تماشا کنید! ربات انسان نما چگونه بالانس روی دست میرود؟ نگاهی به شاهکار تازه اطلس بوستون
جدیدترین ویدیوی اطلس بوستون داینامیکس؛ بررسی بالانس روی دست، فناوری کنترل بدن و آینده صنعتی ربات انسان نما.
دنیای رباتیک هر روز شگفتانگیزتر از قبل میشود، اما بعضی ویدیوها واقعاً مرز میان خیال و واقعیت را کمرنگ میکنند. یکی از همین نمونهها، جدیدترین ویدیوی ربات انساننمای اطلس از شرکت Boston Dynamics است؛ ویدیویی که در آن این ربات سنگینوزن با حرکتی نرم، دقیق و باورنکردنی، بالانس روی دست انجام میدهد و سطحی تازه از تعادل، هماهنگی و کنترل حرکتی را به نمایش میگذارد.
این نمایش فقط یک حرکت نمایشی ساده نیست. در واقع، آنچه در این ویدیو میبینیم، نتیجه سالها تحقیق در زمینه کنترل کل بدن، یادگیری تقویتی، شبیهسازی پیشرفته و انتقال مهارت از محیط مجازی به دنیای واقعی است. اطلس حالا فقط یک ربات برای راهرفتن یا بلندکردن اجسام نیست؛ بلکه به نقطهای رسیده که میتواند حرکاتی شبیه ژیمناستهای حرفهای انجام دهد.
در ادامه، بهصورت دستهبندیشده، نکتهبهنکته و کامل بررسی میکنیم که چرا بالانس روی دست توسط اطلس اینقدر مهم است و این پیشرفت چه معنایی برای آینده صنعت و رباتهای انساننما دارد.
اطلس چیست و چرا این ربات تا این اندازه مهم است؟
اطلس، ربات انساننمای پیشرفته شرکت بوستون داینامیکس است؛ شرکتی که سالهاست با نمایش تواناییهای خارقالعاده رباتهایش توجه جهان را به خود جلب کرده است. اطلس از ابتدا برای کار در محیطهای سخت، ناپایدار و پیچیده طراحی شد؛ محیطهایی که انسان در آنها به انعطافپذیری، تعادل و سرعت واکنش بالا نیاز دارد.
آنچه اطلس را از بسیاری از رباتهای دیگر متمایز میکند، فقط شکل انساننمای آن نیست؛ بلکه تواناییاش در حفظ تعادل، واکنش به تغییرات ناگهانی و اجرای حرکات پیچیده است. این ربات اکنون نهتنها میتواند راه برود، بدود یا بپرد، بلکه میتواند حرکاتی مانند پشتک، L-sit و حالا بالانس روی دست را با دقت بالا اجرا کند.
جدیدترین ویدیو چه چیزی را نشان میدهد؟
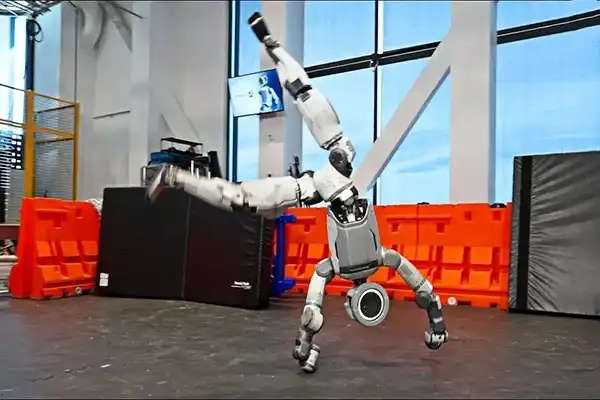
در جدیدترین ویدیوی منتشرشده، اطلس بار دیگر نشان میدهد که رباتهای انساننما وارد مرحلهای تازه شدهاند. در این آزمایش، اطلس در یک وضعیت ناپایدار قرار میگیرد و سپس با یک حرکت کاملاً حسابشده، وزن بدن خود را منتقل کرده و روی دستها بالانس میکند.
این حرکت از چند جهت خیرهکننده است:
- انتقال نرم و کنترلشده وزن از پاها به دستها
- حفظ پایداری در حالتی که مرکز ثقل کاملاً تغییر میکند
- هماهنگی فوقالعاده میان مفاصل و بخشهای مختلف بدن
- اجرای حرکت بدون لرزش شدید یا افت تعادل
- برگشتپذیری و قابلیت بازیابی کنترل در شرایط سخت
در ظاهر شاید این فقط یک نمایش ژیمناستیکی باشد، اما در واقع، پشت این حرکت پیچیده، یک سیستم هوشمند و یکپارچه در حال تصمیمگیری لحظهای است.
راز این تعادل شگفتانگیز چیست؟
مهمترین نکته در پیشرفت جدید اطلس، سیستم کنترل کل بدن است. در روشهای قدیمی، معمولاً حرکت پاها، دستها، تنه و تعادل، بهصورت جداگانه طراحی و برنامهریزی میشد. اما در معماری جدید اطلس، کل بدن بهعنوان یک سیستم واحد و یکپارچه در نظر گرفته میشود.
یعنی چه؟
یعنی همان الگوریتمی که مسئول یک قدمبرداشتن ساده است، میتواند همزمان:
- موقعیت لگن را تنظیم کند
- زاویه مچ پا و مچ دست را تغییر دهد
- هسته مرکزی بدن را سفت یا آزاد کند
- تعادل را هنگام ضربه یا اختلال ناگهانی بازیابی کند
- برای اجرای حرکات پیچیده مثل پشتکوارو یا بالانس روی دست تصمیم بگیرد
این یکپارچگی، دقیقاً همان چیزی است که باعث شده اطلس تا این حد طبیعیتر، روانتر و هوشمندتر از قبل حرکت کند.
نقش یادگیری تقویتی در پیشرفت اطلس
یکی از مهمترین فناوریهایی که در این جهش نقش داشته، یادگیری تقویتی یا Reinforcement Learning است. در این روش، ربات بهجای اینکه فقط دستورهای ثابت بگیرد، در یک محیط شبیهسازیشده بارها و بارها تمرین میکند و از موفقیتها و شکستهای خود یاد میگیرد.
به زبان ساده، مهندسان بوستون داینامیکس شرایط مختلفی را در شبیهساز ایجاد میکنند؛ مثلاً:
- سطوح لغزنده
- تغییر ناگهانی وزن
- ضربههای غیرمنتظره
- وضعیتهای ناپایدار
- حرکات انتقالی پیچیده
سپس ربات در این محیطها تمرین میکند تا بهترین راه حفظ تعادل و انجام حرکت را پیدا کند. نتیجه این است که اطلس بهجای اجرای صرفِ دستورات خشک، رفتاری تطبیقپذیر و هوشمند از خود نشان میدهد.
انتقال دانش از شبیهساز به دنیای واقعی
یکی از چالشهای مهم در رباتیک همیشه این بوده که چیزی که در شبیهسازی خوب جواب میدهد، لزوماً در دنیای واقعی هم به همان خوبی عمل نمیکند. اما در اطلس، مهندسان موفق شدهاند دانش آموختهشده در شبیهساز را مستقیماً به سختافزار واقعی منتقل کنند.
این موضوع اهمیت زیادی دارد، چون باعث میشود:
- نیاز به تنظیمات دستی طولانی کمتر شود
- سرعت توسعه قابلیتهای جدید بالا برود
- ربات سریعتر برای محیط واقعی آماده شود
- خطاهای ناشی از تفاوت شبیهسازی و واقعیت کاهش یابد
به همین دلیل است که اطلس میتواند بدون نیاز به بازنویسی پرهزینه و وقتگیر، مهارتهای پیچیده را در دنیای واقعی اجرا کند.
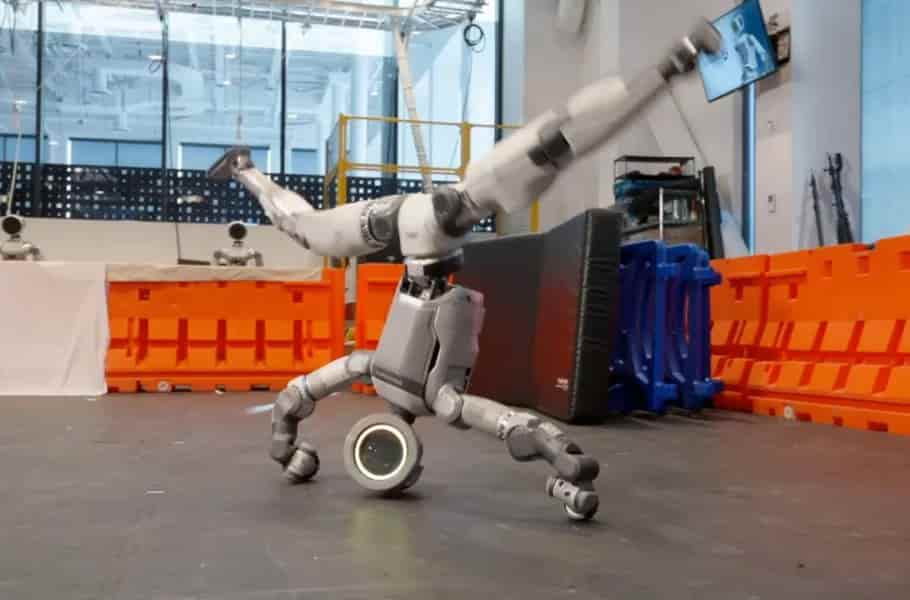
هماهنگی لگن، مچ پا و هسته مرکزی بدن
در حرکت بالانس روی دست، فقط قدرت دستها مهم نیست. مهمتر از آن، هماهنگی کل بدن است. اطلس در این حرکت نشان میدهد که چگونه:
- لگن برای جابهجایی صحیح مرکز ثقل تنظیم میشود
- مچ پا در مرحله انتقال وزن به تعادل کمک میکند
- هسته مرکزی بدن نقش ستون پایداری را بازی میکند
- دستها و شانهها فشار را کنترل میکنند
- کل بدن مثل یک زنجیره هماهنگ عمل میکند
این سطح از هماهنگی در رباتی با این ابعاد و وزن، یک دستاورد بسیار مهم مهندسی محسوب میشود.
آیا این حرکات فقط برای نمایش هستند؟
شاید در نگاه اول، اجرای بالانس روی دست یا حرکات ژیمناستیکی فقط جنبه تبلیغاتی داشته باشد؛ اما واقعیت این است که این نمایشها هدفی فراتر از جلب توجه دارند. این حرکات در واقع آزمونهایی برای سنجش پایداری، انعطافپذیری و هوش حرکتی ربات هستند.
اگر رباتی بتواند در شرایط ناپایدار و دشوار، بدن خود را کنترل کند، احتمالاً در محیطهای صنعتی هم عملکرد بهتری خواهد داشت. بهعبارت دیگر، بالانس روی دست فقط یک نمایش نیست؛ بلکه نشانهای از آمادگی برای انجام کارهای واقعی در دنیای واقعی است.
اطلس و آینده صنعت
نکته بسیار مهم این است که نسخه نمایشی اطلس فقط بخش تحقیقاتی ماجراست. نسخه تولیدی این ربات قرار است وارد صنعت شود. طبق اطلاعات منتشرشده، نسخه صنعتی اطلس دارای:
- ۵۶ درجه آزادی
- گریپرهای پیشرفته چهار انگشتی
- سنسورهای لمسی دقیق
- توانایی کار در محیطهای محدود و پیچیده
خواهد بود.
این مشخصات نشان میدهد که اطلس برای محیطهایی مثل کارخانههای بزرگ طراحی شده؛ جایی که ربات باید هم دقیق باشد، هم منعطف و هم بتواند با شرایط غیرقابلپیشبینی کنار بیاید.
برنامه هیوندای برای استفاده از اطلس
گروه هیوندای موتور که مالک بوستون داینامیکس است، رسماً اعلام کرده که این رباتهای انساننما تا سال ۲۰۲۸ در کارخانه بزرگ Metaplant آمریکا مستقر خواهند شد. این تصمیم فقط یک آزمایش ساده نیست؛ بلکه بخشی از یک برنامه صنعتی جدی و بلندمدت است.
طبق برنامهریزی انجامشده:
- اطلس ابتدا در چیدمان و توالیبندی قطعات فعالیت میکند
- سپس بهتدریج نقشهای پیچیدهتری میگیرد
- تا سال ۲۰۳۰ قرار است به یک نیروی کار هوشمند برای مونتاژ کامل قطعات خودرو تبدیل شود
این یعنی رباتی که امروز با بالانس روی دست ما را شگفتزده میکند، فردا ممکن است در خطوط تولید خودرو، وظایف پیچیده و حساس را بر عهده داشته باشد.
چرا این پیشرفت برای آینده مهم است؟
پیشرفت اطلس فقط به معنای ساخت یک ربات جذابتر نیست. این تحول میتواند روی آینده بسیاری از حوزهها اثر بگذارد:
- صنعت: انجام کارهای پیچیده در محیطهای محدود
- ایمنی: کاهش حضور انسان در شرایط خطرناک
- بهرهوری: اجرای وظایف تکراری با دقت بالا
- پژوهش: توسعه نسل بعدی سیستمهای کنترل حرکتی
- زندگی روزمره: نزدیکتر شدن رباتهای انساننما به محیطهای واقعی
در واقع، هر حرکت نمایشی اطلس، یک قدم بهسمت حضور واقعیتر رباتها در کنار انسانهاست.
جمع بندی
تماشا کنید! ربات انساننما چگونه بالانس روی دست میرود فقط یک تیتر هیجانانگیز نیست؛ بلکه خلاصهای از یکی از مهمترین دستاوردهای امروز رباتیک است. جدیدترین ویدیوی اطلس بوستون داینامیکس نشان میدهد که رباتهای انساننما دیگر فقط ماشینهایی برای حرکت ساده نیستند، بلکه به سیستمهایی یکپارچه، هوشمند و بسیار توانمند تبدیل شدهاند.
بالانس روی دست، پشتکوارو، L-sit و بازیابی تعادل در برابر ضربه، همگی نشانههایی از بلوغ فناوری کنترل کل بدن و یادگیری تقویتی هستند. مهمتر از همه، این پیشرفتها مستقیماً به دنیای صنعت و کاربردهای واقعی راه پیدا میکنند. اطلس امروز ما را شگفتزده میکند و احتمالاً فردا، در کارخانهها و محیطهای کاری، تعریف تازهای از همکاری انسان و ماشین ارائه خواهد داد.