سوسک سایبورگ با کلاه نوری کنترل میشود (نوآوری دانشگاه اوزاکا)
سوسک های سایبورگ با کلاه نوری UV و کوله پشتی بی سیم توسط دانشگاه اوزاکا کنترل میشوند! روشی غیرتهاجمی برای نجات و نظارت. جزئیات در های ورت. همین الان بخوانید.

سوسکهای سایبورگ با "کلاه نوری" کنترل میشوند: گامی نوین در رباتیک زیستترکیبی از دانشگاه اوزاکا! | های ورت
(فراتر از داستانهای علمی-تخیلی؛ وقتی حشرات به دستیاران رباتیک ما تبدیل میشوند!)
ایده کنترل حشرات و استفاده از آنها برای انجام ماموریتهای خاص، سالهاست که ذهن دانشمندان و نویسندگان داستانهای علمی-تخیلی را به خود مشغول کرده است. از فیلمهای جاسوسی تا بازیهای ویدیویی، موجودات کوچکی که به ابزارهای پیشرفته مجهز شده و از راه دور کنترل میشوند، همواره نمادی از آیندهای هیجانانگیز و شاید کمی نگرانکننده بودهاند. اما اکنون، این آینده به لطف پیشرفتهای چشمگیر در رباتیک زیستترکیبی (Bio-hybrid Robotics) و هوش مصنوعی، در حال تبدیل شدن به واقعیتی ملموس است.
به تازگی، تیمی از محققان برجسته در دانشگاه اوزاکا (Osaka University) ژاپن، تحت هدایت پروفسور کیسوکه موریشیما (Keisuke Morishima)، از یک روش کاملاً نوآورانه و غیرتهاجمی برای کنترل دقیق سوسکهای سایبورگ (Cyborg Cockroaches) با استفاده از نور فرابنفش (UV) رونمایی کردهاند! همانطور که وبسایت معتبر Interesting Engineering گزارش داده است، این دستاورد نه تنها مشکلات و محدودیتهای روشهای کنترلی قبلی (مانند تحریک الکتریکی) را برطرف میکند، بلکه با تکیه بر غرایز طبیعی خود حشره، امکان هدایت دقیق و بدون استرس آنها را فراهم میآورد و درهای جدیدی را به روی کاربردهای عملی این "سایبورگهای مینیاتوری" در زمینههایی چون جستجو و نجات، نظارت محیطی و بازرسیهای صنعتی میگشاید.
اما این "کلاههای نوری" چگونه کار میکنند؟ چرا روش های قبلی کنترل حشرات سایبورگ کارایی لازم را نداشتند؟ عملکرد این سوسکهای نوری در آزمون های آزمایشگاهی چگونه بوده و چه آیندهای در انتظار این فناوری شگفتانگیز است؟ های ورت (hiwert.com) در این مقاله جامع، به بررسی عمیق این نوآوری پیشگامانه، جزئیات فنی سیستم کنترل نوری، نتایج تحقیقات، کاربردهای بالقوه و چشمانداز آینده رباتیک زیستترکیبی میپردازد.
چالشهای کنترل سایبورگهای حشرهای: محدودیتهای روشهای تهاجمی گذشته
پیش از معرفی روش جدید دانشگاه اوزاکا، مهم است که بدانیم کنترل حشرات سایبورگ با چه چالشهایی روبرو بوده است:
-
تحریک الکتریکی: روشی رایج اما پر از اشکال در گذشته، رایجترین روش برای کنترل حرکات حشرات سایبورگ، استفاده از تحریک الکتریکی مستقیم به اعصاب یا عضلات آنها بود. در این روش، الکترودهای کوچکی در بدن حشره کاشته میشد و با ارسال پالسهای الکتریکی، محققان سعی در هدایت حرکات آن داشتند. اما این روش با مشکلات جدی همراه بود:
- تهاجمی بودن: کاشت الکترودها یک فرآیند تهاجمی بود که میتوانست به حشره آسیب رسانده یا باعث استرس و درد در آن شود.
- کاهش عملکرد کلی حشره: این روشهای تهاجمی اغلب عملکرد طبیعی و سلامت کلی حشره را به شدت کاهش میدادند و طول عمر مفید آن را به عنوان یک سایبورگ محدود میکردند.
- سازگاری حشره و کاهش کارایی در طول زمان: یکی از بزرگترین مشکلات، سازگار شدن (Adaptation) حشره با تحریکات الکتریکی بود. پس از مدتی، حشره به پالسها عادت کرده و دیگر به آنها پاسخ نمیداد، که باعث کاهش شدید کارایی سیستم کنترلی در درازمدت میشد.
این محدودیتها، نیاز به یافتن روشهای کنترل غیرتهاجمیتر، پایدارتر و انسانیتر را بیش از پیش ضروری میساخت.
نوآوری از سرزمین آفتاب تابان: کنترل سوسکهای سایبورگ با نور UV و احترام به طبیعت ذاتی حشره!
تیم تحقیقاتی دانشگاه اوزاکا با رهبری پروفسور موریشیما، رویکردی کاملاً متفاوت و هوشمندانه را برای کنترل سوسکهای سایبورگ در پیش گرفتهاند:
-
بهرهگیری هوشمندانه از غریزه طبیعی: بیزاری سوسک از نور فرابنفش (UV) اساس این نوآوری، استفاده از یک غریزه طبیعی و ذاتی در سوسکها است: بیزاری و تمایل به دوری از نور فرابنفش (UV Light Aversion). بسیاری از حشرات، از جمله سوسکها، به طور طبیعی از نور UV دوری میکنند، زیرا این نور میتواند برای آنها مضر باشد. محققان دانشگاه اوزاکا با درک این رفتار غریزی، سیستمی را طراحی کردهاند که به جای "فرمان دادن" اجباری به حشره، او را به آرامی و با استفاده از همین حس بیزاری طبیعی، به سمت دلخواه هدایت میکند.
-
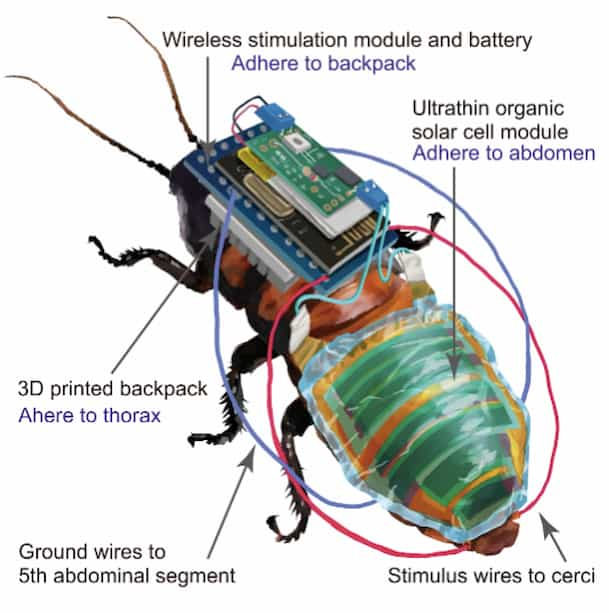
سیستم کنترل هوشمند و غیرتهاجمی: "کلاه نوری" و "کولهپشتی بیسیم" سیستم کنترلی توسعهیافته توسط این تیم، شامل دو جزء اصلی است که به سوسک متصل میشود:
یک "کلاه ایمنی" بسیار سبک و مجهز به دیودهای ساطعکننده نور UV (UV-emitting helmet): این کلاه کوچک روی سر سوسک قرار میگیرد و میتواند نور UV را به صورت هدفمند به یکی از چشمهای سوسک بتاباند.
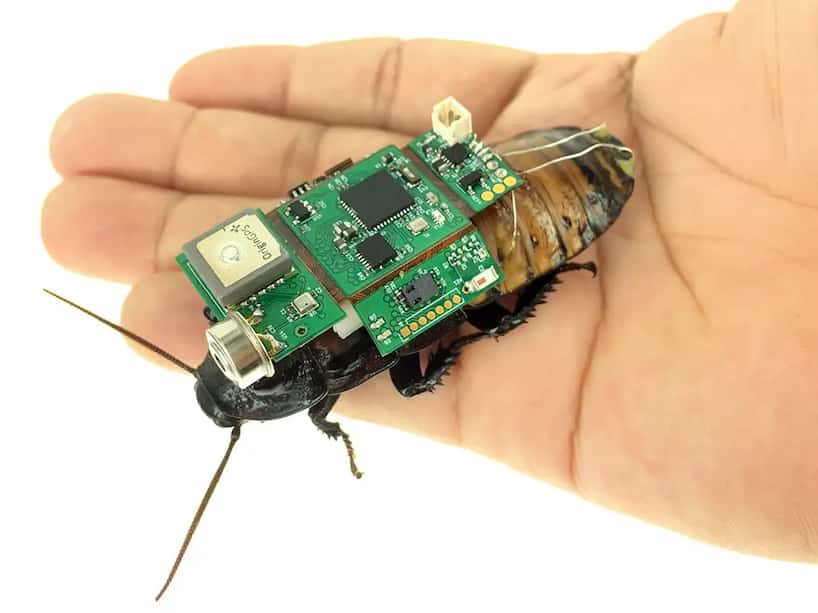
یک "کولهپشتی" مینیاتوری و بیسیم (Wireless Sensor Backpack): این کولهپشتی که روی پشت سوسک نصب میشود، شامل باتری، مدار کنترل و گیرنده بیسیم است که دستورات را از اپراتور انسانی دریافت کرده و نور UV روی کلاه را فعال میکند.
-
مکانیزم هدایت دقیق و بدون استرس: نحوه عملکرد این سیستم بسیار هوشمندانه است:
وقتی اپراتور میخواهد سوسک به سمت چپ بپیچد، نور UV بر روی چشم راست سوسک تابانده میشود. سوسک به طور غریزی سعی میکند از این نور دوری کند و در نتیجه به سمت چپ میچرخد.
به طور مشابه، برای چرخش به راست، نور UV بر روی چشم چپ تابانده میشود. این روش، امکان هدایت دقیق و کنترلشده حرکات سوسک را بدون ایجاد استرس زیاد یا آسیب فیزیکی به آن فراهم میکند. به گفته محققان، این رویکرد "کنترل پایدار بر روی اندامهای حسی را امکانپذیر کرده و سلامت حشرات را حفظ میکند."
-
(H4) ویژگی مهم و کاربردی صرفهجویی در انرژی: سیستم طراحی شده توسط تیم دانشگاه اوزاکا، شامل یک ردیاب حرکتی (Motion Detector) نیز میباشد. این ردیاب باعث میشود که نور UV تنها زمانی که حشره ثابت است و حرکت نمیکند، فعال شود. این یک اقدام هوشمندانه برای صرفهجویی در مصرف انرژی باتری کولهپشتی است و به افزایش طول مدت عملیاتی سوسک سایبورگ کمک میکند. همچنین، این ویژگی "نیاز به کنترل مصنوعی حرکات حشره در محیطهای تنظیمشده را کاهش میدهد که یک مزیت محسوب میشود."
عملکرد شگفتانگیز و فراتر از انتظار در آزمونهای آزمایشگاهی: سوسکهای نوری در هزارتو!
برای ارزیابی کارایی این سیستم کنترل نوری، محققان آزمایشهای مختلفی را انجام دادند که نتایج بسیار امیدوارکنندهای به همراه داشت:
-
موفقیت چشمگیر در عبور از زمینهای دشوار: عملکرد سوسکهای سایبورگ هدایتشونده با نور، حتی در عبور از زمینهای ناهموار و دشوار نیز "استثنایی" توصیف شده است.
-
آزمایش چالشبرانگیز هزارتو (Maze Test): اثبات کارایی و دقت سیستم در یکی از آزمایشهای کلیدی، سوسکها در یک محیط هزارتو مانند (Maze-like Environment) قرار داده شدند. نتایج حیرتانگیز بود:
۹۴ درصد از سوسکهای مجهز به سیستم کنترل نوری توانستند با موفقیت از هزارتو خارج شده و مسیر صحیح را پیدا کنند!
این در حالی بود که تنها ۲۴ درصد از سوسکهای معمولی (بدون سیستم کنترل) موفق به انجام این کار شدند. این اختلاف فاحش، به وضوح کارایی و دقت بالای سیستم کنترل نوری مبتنی بر UV را در هدایت سوسکها در محیطهای پیچیده نشان میدهد.
کاربردهای بالقوه و هیجانانگیز سوسکهای سایبورگ نوری: از نجات جان انسانها تا نظارت بر محیط زیست
این پیشرفت در سیستمهای کنترل نوری، درهای جدیدی را به روی استفاده از سایبورگهای حشرهای در طیف وسیعی از کاربردهای عملی و حیاتی باز میکند، به خصوص در محیطهایی که برای انسان یا رباتهای بزرگتر، خطرناک یا غیرقابل دسترس هستند:
-
قهرمانان کوچک و پنهان در ماموریتهای جستجو و نجات (Search and Rescue - SAR): تصور کنید پس از یک زلزله یا فروریختن یک ساختمان، بتوان ارتشی از این سوسکهای سایبورگ کوچک را به داخل آوار فرستاد تا با عبور از فضاهای بسیار تنگ و باریک، به جستجوی بازماندگان پرداخته یا اطلاعاتی از وضعیت محیط داخلی ارسال کنند. اندازه کوچک و چابکی آنها در این سناریوها یک مزیت بزرگ است.
-
دیدهبانان مینیاتوری و خستگیناپذیر برای نظارت بر محیط زیست: از این سوسکها میتوان برای نظارت بر محیط زیست در مناطق وسیع یا صعبالعبور استفاده کرد. به عنوان مثال، برای ردیابی آلایندههای خاص، بررسی تغییرات دمایی یا رطوبتی در اکوسیستمهای حساس، یا حتی نظارت بر جمعیت گونههای دیگر.
-
بازرسان صنعتی دقیق و قابل اعتماد در نقاط کور و خطرناک: در صنایع پیچیدهای مانند نیروگاهها، پالایشگاهها یا حتی زیرساختهای شهری (مانند لولههای فاضلاب)، این سوسکها میتوانند برای بازرسی تجهیزات، شناسایی نشتیها یا ارزیابی آسیبهای ساختاری در نقاطی که دسترسی به آنها برای انسان خطرناک یا پرهزینه است، به کار گرفته شوند.
-
مزیت ویژه در محیطهای بسیار حساس و شکننده: ماهیت غیرتهاجمی و سبک این سیستم کنترلی و همچنین اندازه کوچک خود سوسکها، باعث میشود که استفاده از آنها در مکانهای بسیار حساس و شکننده (مانند سایتهای باستانشناسی، موزهها یا حتی در بدن موجودات زنده برای کاربردهای پزشکی آینده) که رباتهای معمولی ممکن است باعث ایجاد اختلال یا آسیب بیش از حد شوند، بسیار سودمند باشد.
آینده رباتیک زیستترکیبی و سوسکهای سایبورگ: گامهای بعدی و چشمانداز پژوهشگران دانشگاه اوزاکا
تیم تحقیقاتی دانشگاه اوزاکا این دستاورد را تنها یک نقطه شروع میداند و برنامههای هیجانانگیزی برای آینده این فناوری دارد:
-
افزودن حسگرهای بیشتر برای قابلیتهای گستردهتر: گام بعدی، ادغام انواع دیگری از حسگرهای مینیاتوری (مانند حسگرهای دما، گاز، رطوبت، یا حتی دوربینهای بسیار کوچک) بر روی کوله پشتی این سوسک هاست. این امر به آنها اجازه میدهد تا در ماموریتهای مختلف، به خصوص در واکنش به شرایط اضطراری، اطلاعات بسیار دقیقتری از محیط جمعآوری کنند.
-
بهبود قابلیت های ارتباطی و هوش مصنوعی: تلاش برای تقویت ویژگی های ارتباطی این سیستمهای زیستترکیبی و همچنین افزایش هوشمندی الگوریتم های کنترلی، از دیگر اهداف این تیم است تا عملکرد کلی آنها را در سناریوهای پیچیدهتر بهبود بخشند.
-
تأکید بر تعادل بین کنترل فناورانه و رفتار ذاتی موجود زنده: نکته بسیار مهم در رویکرد تیم دانشگاه اوزاکا، احترام به طبیعت و رفاه حشره است. آنها سعی دارند تا با استفاده از غرایز طبیعی، به جای اعمال کنترل کاملاً مصنوعی و اجباری، به یک تعادل هوشمندانه بین هدایت فناورانه و رفتارهای ذاتی موجود زنده دست یابند. این رویکرد، نه تنها انسانیتر و با ملاحظات اخلاقی بیشتری همراه است، بلکه میتواند به پایداری و کارایی بهتر سیستم در درازمدت نیز کمک کند.
-
پتانسیل در کاربردهایی که رباتیک سنتی در آنها ناتوان یا ناکارآمد است: پیشبینی میشود که این سوسکهای سایبورگ که به نور پاسخ میدهند، بتوانند در برخی کاربردهایی که رباتیک سنتی به دلیل اندازه، هزینه، پیچیدگی یا محدودیتهای دیگر، ناکافی یا نامناسب است، به ابزارهایی بسیار ارزشمند تبدیل شوند.
سوسک های سایبورگ نوری، طلوع عصری جدید در همکاری شگفت انگیز انسان، حشره و هوش مصنوعی! | های ورت
نوآوری محققان دانشگاه اوزاکا در توسعه سیستم کنترل سوسکهای سایبورگ با استفاده از "کلاه نوری" و تحریک مبتنی بر بیزاری از نور UV، یک دستاورد پیشگامانه و بسیار هیجانانگیز در حوزه رباتیک زیستترکیبی است. این روش غیرتهاجمی، انسانیتر و کارآمدتر، نه تنها بر محدودیتهای روشهای قبلی غلبه میکند، بلکه با عملکرد خیرهکننده خود در آزمونها، پتانسیل عظیم این "سایبورگهای مینیاتوری" را در کاربردهای حیاتی مانند جستجو و نجات، نظارت محیطی و بازرسیهای صنعتی به نمایش میگذارد.
این فناوری، مرزهای همکاری بین انسان، موجودات زنده و هوش مصنوعی را جابجا کرده و نشان میدهد که چگونه میتوان با درک عمیقتر از طبیعت و ترکیب آن با نوآوریهای فناورانه، به راهحلهایی دست یافت که پیش از این تنها در داستانهای علمی-تخیلی قابل تصور بودند. آیندهای که در آن، ارتشی از حشرات سایبورگ به کمک ما میآیند، شاید دیگر چندان دور نباشد.